|
Block Sorting Robotic Arm
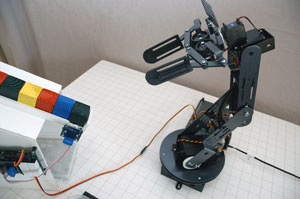 I recently got a shiny newCrustCrawler SG6-UTand as a first project decided to build the prerequisite block sorting application. I’ve had aTaos Color Sensorthat I bought from Parallax laying for around for months waiting for an application. Now I had one. I would use it to determine the color of a block and then place the block into the appropriate bin. I built a simple block dispenser from which the SG6 could get the blocks in a consistent location. It basically consists of a long angled chute. The arm picks up a block at the end of the chute and the remaining blocks then slide down. The color sensor is mounted at the end of the chute so that the color can be determined before it is picked up by the arm. I recently got a shiny newCrustCrawler SG6-UTand as a first project decided to build the prerequisite block sorting application. I’ve had aTaos Color Sensorthat I bought from Parallax laying for around for months waiting for an application. Now I had one. I would use it to determine the color of a block and then place the block into the appropriate bin. I built a simple block dispenser from which the SG6 could get the blocks in a consistent location. It basically consists of a long angled chute. The arm picks up a block at the end of the chute and the remaining blocks then slide down. The color sensor is mounted at the end of the chute so that the color can be determined before it is picked up by the arm.
 The entire application is built around a Basic Stamp 2p on a Board of Education. The Stamp/BOE is mounted on the block dispenser. The dispenser itself was made from 1/4” foam board that you can get in any office supply store. The blocks are 1 1/4” square and were manufactured in my father’s rather well equipped work working shop. They were then spray painted in red, green, blue and yellow. The entire application is built around a Basic Stamp 2p on a Board of Education. The Stamp/BOE is mounted on the block dispenser. The dispenser itself was made from 1/4” foam board that you can get in any office supply store. The blocks are 1 1/4” square and were manufactured in my father’s rather well equipped work working shop. They were then spray painted in red, green, blue and yellow.
Use the links to the right to access the Basic Stamp code and watch a video of this arm in action. Obviously the code is specific to this application’s physical layout but you may find parts of it useful for your own applications. I used many of the arm moving subroutines originally written by Mike Gebhard.
|
 Robots with a Mission
Robots with a Mission
